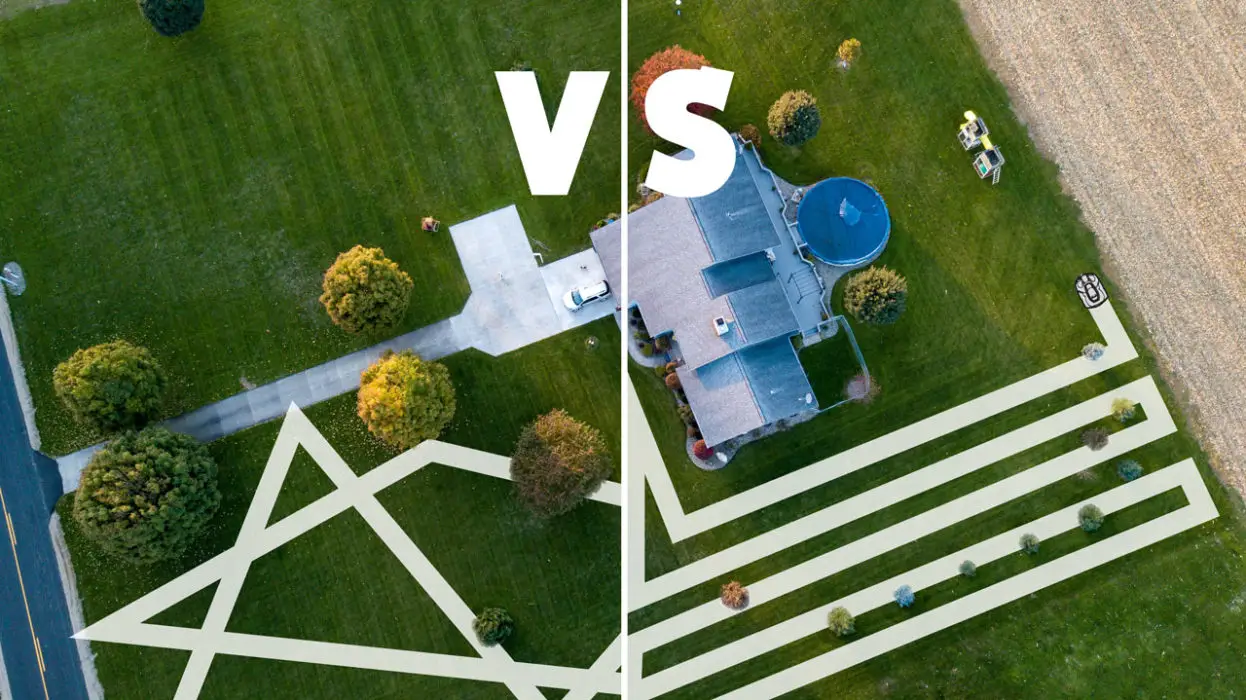
Schöne Graphik!
Nur aus Neugierde gefragt - und unabhängig von der Machbarkeit- gefragt: wozu?
Wo liegen die Vorteile des systematischen Mähens, aus denen heraus Du Dir das wünschst?
Nachteile die mir spontan einfallen:
- Spurrillenbildung
-
GPS-Abhängigkeit, weil:
— woher weiß der Mäher sonst, wo er wieder weitermachen muss, wenn für die Akkuladung zwischendurch der Heimweg angetreten wurde? -> virtuelle Karte notwendig
— muss für den Heimweg dann doch wieder im Chaos-Modus nach dem Suchkabel suchen
— unnötige Fahrten zurück zum Weitermach-Punkt nach der Akkuladung. Bei großen Gärten können das sehr weite Strecken sein, auf denen wieder viel Akku ohne Mähvorgang verloren geht. Im derzeitigen Chaosmodus fängt er sofort wieder das Mähen an.
- Das Erstellen der virtuellen Karte würde bei aktueller Ausstattung der Mäher (ohne Radar oder Ultraschallsensoren) alleine schon viele Fahrten über und um den Rasenfläche bedeuten. Was beim einfachen Quadrat vor dem Haus noch geht wird bei einer komplexen Gartenform sehr anspruchsvoll in der Umsetzung - und wehe er findet sich mal nicht mehr zurecht, oder verliert die Karte....
Weiß jemand, ob der Bosch das immer noch so macht? (War noch ohne
GPS mittels interner „Karte“)
Bin gespannt auf das Killer-Argument